


The uStepper S32 solves a very simple problem which many makers come across, the ability to easily control a stepper motor. Up until now the solution to control a stepper motor was to use an Arduino with messy wiring to an external driver, this is where uStepper comes in and offers much much more.
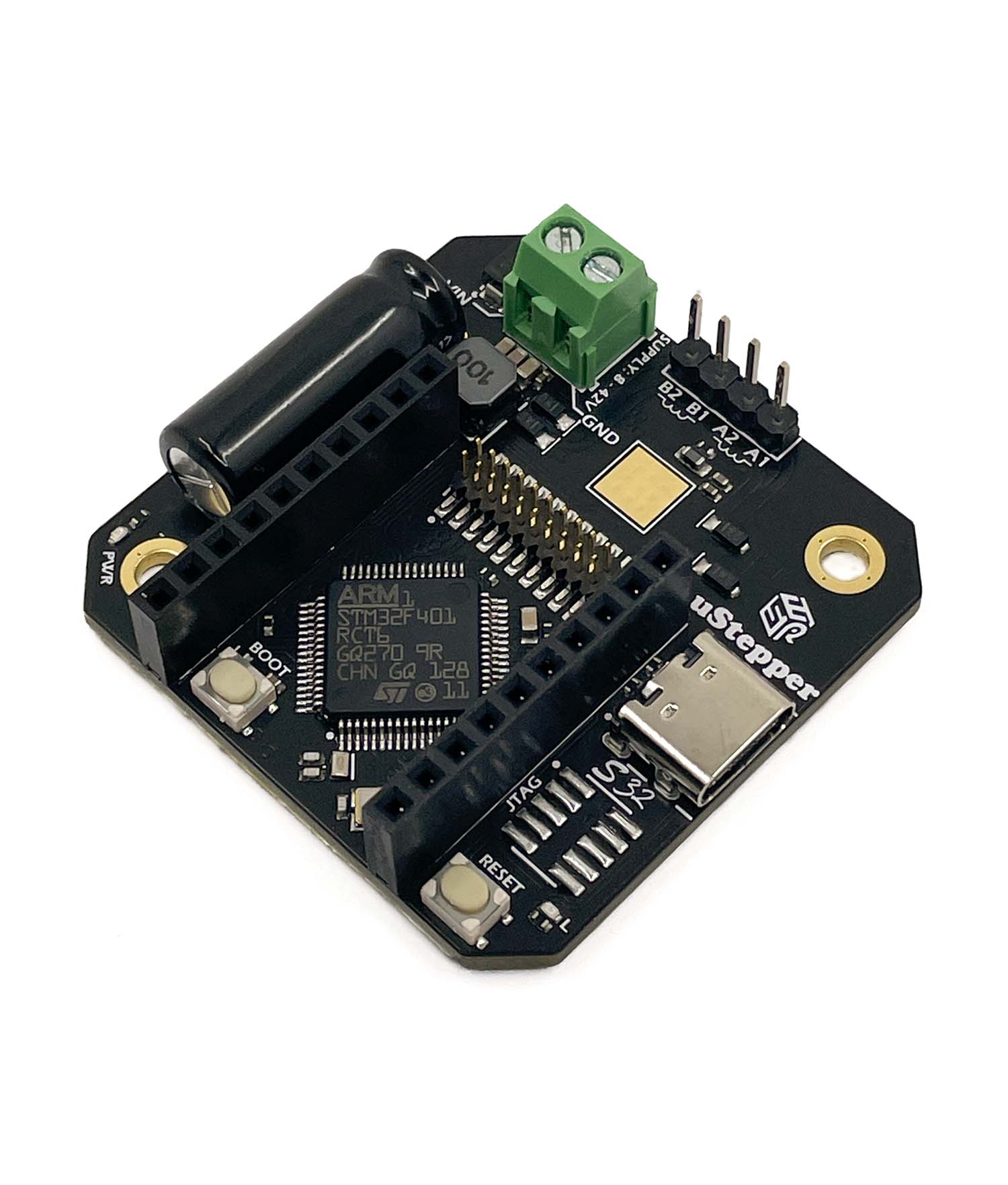
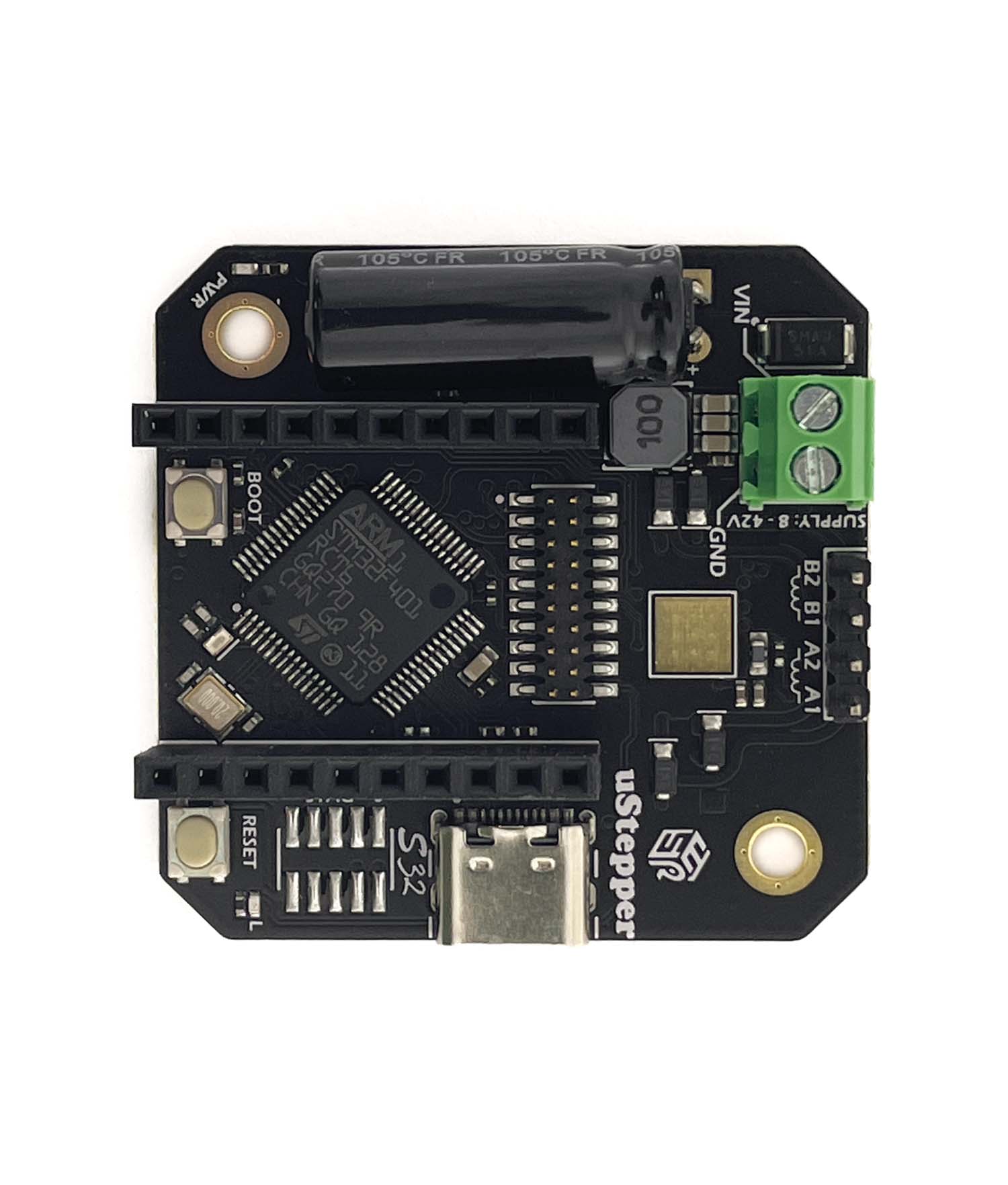
An ultra-compact stepper motor controller board, the uStepper S32 is Arduino compatible with a built-in stepper driver. The uStepper S32 mounts directly onto the back of a NEMA17 or NEMA23 Stepper Motor.
In addition to this, it also has a 15bit rotary encoder, which allows absolute position tracking of the motor shaft making missed stepped detection possible.
The uStepper S32 is an ideal stepper motor controller to solve all your stepper motor control needs.
Rotary Encoder
A neodymium magnet attached to the back of the motor shaft, along with a magnetic encoder chip, allows for north/south pole tracking of the magnet. With this information, the angle of the stepper motor shaft can be determined. The encoder has 15bit resolution, so the shaft position can be tracked to a resolution of 0.0115 degrees.
The driver resolution is 0.007 degrees, with a feedback loop, if the sensor reading has a greater deviation than 0.007 degrees, a microstep can be generated to compensate.
Stepper Driver
The uStepper S32 uses a TMC5130 Driver. It provides superb noiseless and smooth operation. The TMC5130 has a massive 1/256 microstepping with interpolation. This will significantly reduce any resonance generated by the stepper motor and insure the smoothest possible operation.
Features
| Processor | 32bit STM32F401 Cortex-M4 microcontroller running at up to 84MHz |
| Connectivity | 1 x USB-C connection |
| Stepper Driver | 1 x TMC5130 up to 2.5A (peak) |
| Encoder | 15bit Rotary Encoder (0.011 degrees resolution) |
| Input Voltage | 8 – 42V |
| Dimensions | 41.8 x 41.8mm |
Full details can be found on the uStepper S32 Product Sheet
What you will be getting
- uStepper S32 Controller
- uStepper S32 NEMA17 Dual Mount (Can be fixed* or magnetically attached to a stepper motor)
- Neodymium Magnet
- Stepper Driver Heatsink
- Optional – uStepper S32 NEMA23 Fixed Mount
In addition to the above the Starter Kit includes:
Please note a USB C Cable is not included
*The bolt provided will only work with NEMA17 Stepper Motors that have a body length of 40mm. For other body lengths, the uStepper S32 will have to be attached magnetically.
| uStepper S32 Kit | uStepper S32 + NEMA17 Mount, uStepper S32 + NEMA17 & NEMA23 Mount, uStepper S32 Starter Kit + NEMA17 Mount, uStepper S32 Starter Kit + NEMA17 & NEMA23 Mount |
|---|
Documentation
All documentation for uStepper products can be found on their YouTube Channel: https://www.youtube.com/@uStepperDK
To assemble and use the uStepper S32 we recommend watching the following videos:
- uStepper Assembly Video
- uStepper Software Installation Video
In the video, for 'Additional Boards Manager URLs' use: https://raw.githubusercontent.com/uStepper/uStepperSTM32Hardware/master/package.json)
When programming your board complete the following:
- Attach your uStepper S32 board to your PC and verify it shows up under "port" in the tools menu.
- Load your program and compile it.
- Resolve any errors
- Press and hold down the "Boot" switch.
- Press the "Reset" switch and release it
- Release the "Boot" switch.
- Now press upload in the Arduino IDE and the program will upload.
2 reviews for uStepper S32 Controller
Only logged in customers who have purchased this product may leave a review.
Related products


£7.60
Ex VAT: £6.33
Ex VAT: £6.33
Taxes Calculated at Checkout


£198.00 Ex VAT: £165.00
Taxes Calculated at Checkout


(20)
From: £171.00
Ex VAT: £142.50
Ex VAT: £142.50
Taxes Calculated at Checkout

(2)
£16.50 Ex VAT: £13.75
Taxes Calculated at Checkout


(4)
£270.00 Ex VAT: £225.00
Taxes Calculated at Checkout

£8.70 Ex VAT: £7.25
Taxes Calculated at Checkout

£16.45 Ex VAT: £13.71
Taxes Calculated at Checkout

£2.95 Ex VAT: £2.46
Taxes Calculated at Checkout
Nigel Cowley (verified owner) –
I would give this board 5 stars if there were more code examples specifically for this board. i have managed to get it working for my application, and it is does work well!
Witold Chalupczak (verified owner) –
Works fine, quick delivery